"To improve the reliability and availability of sustainable energy systems through the development of innovative remote & autonomous maintenance solutions."
- RAM Robotics Mission Statement
ARIS, the Autonomous Riser Inspection System, aims to reduce cable maintenance costs for Floating Offshore Wind Turbines by up to 75%, using innovative on-cable inspection.
ARIS' design is focused on providing wind farm operators with accurate, robust and useful data about the condition of their cables in a safe and cost-effective manner, reducing risk both to the cable and any personnel undertaking inspections.
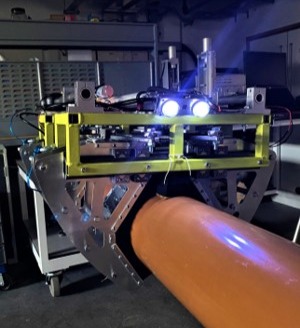
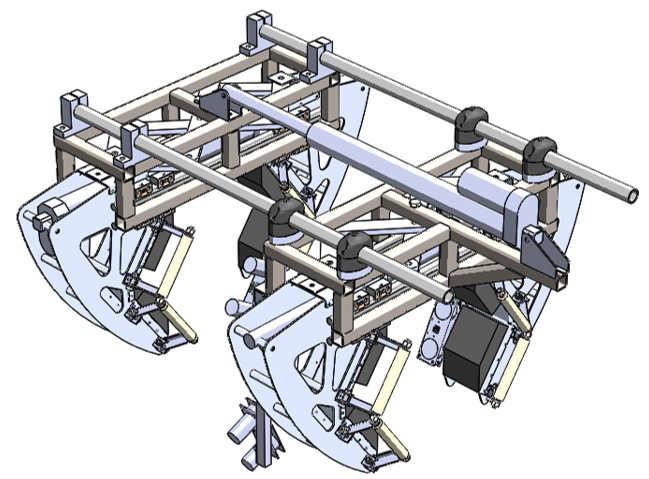
A small robot autonomously traverses the cable, providing a modular platform to deploy proven off-the-shelf sensors tailored to inspection objectives. Multiple robots can be deployed in parallel, for maximum deployment cost efficiency.
A 360 degree inspection can be achieved, and defects localised to 3% accuracy using odometry. ARIS has currently been demonstrated for visual inspections, using a machine vision algorithm to autonomously identify damage to the cable sheath. Commercially available EMF, ultrasonic or thermal sensors will identify hidden defects, such as water ingress or conductor issues.
Deployment is anticipated to be from smaller, more cost-effective vessels than existing ROV inspections. Defects can be identified early and remedial works executed at ~25% of the cost of replacing a failed cable.
The team has a professional background solving challenging engineering problems in a range of sectors including nuclear robotics, fusion energy and maritime. The experience gained in these sectors allows RAM Robotics to deliver bespoke, first of a kind solutions capable of safely operating in extreme conditions.
The team was first formed at the University of Southampton for a group design project, where the resulting research into floating off-shore wind O&M highlighted unique challenges faced by the industry. As a key technology in the endeavour to meet net zero, the team (being engineers) looked for a solution. The problem of premature riser cable failure was selected and the ARIS project was born.
Following completion of Masters Degrees in Engineering, the team put ARIS on hold whilst the members went their separate ways, gaining diverse professional engineering experience in a range of industries.
Now as a small agile team of ambitious engineers, we are back as RAM Robotics Ltd to take on challenging maintenance and inspection problems - starting with riser cable failures.
.jpg)
To meet our Mission Statement, we will need to explore the below steps to bring ARIS to its full capability.

Having taken the first step by setting up RAM Robotics we are now looking for funding to continue the technical development of ARIS.
We will take historical achievements and lessons learned from our collective experience to develop a functioning proof of concept that delivers on Stakeholder Requirements.
Collaborating with leading entities in the offshore industry will be key to ARIS addressing their needs as effectively as possible.